
千葉市発、自治体が先導する未来モビリティへの挑戦
デジタルツインが拓く自動運転の新地平

2016年に国家戦略特区に指定された千葉市では、新たなビジネスモデル創出による経済活性化や次世代の街づくりに向けて、先進技術の社会実装が進められている。中でもモビリティ分野は注目されており、自動運転を含む次世代技術の実証実験が多数行われている。2025年6月2日には、幕張新都心地区の3.8kmルートを再現したバーチャル空間にて、自動運転車の安全性を検証するシミュレーションを実施したことを市長定例記者会見において報告した。これにより、現実では再現困難な危険シナリオの検証が可能となり、実用化に向けた貴重な知見が得られた。本実験はBIPROGYが運営し、V-Drive Technologiesがシミュレーション技術を提供した。社会的価値創出に取り組むBIPROGYが2025年6月に東京で開催し、各界の有識者やBIPROGYグループ社員が多彩なテーマで講演を行った「BIPROGY FORUM 2025」では、千葉市の樋口哲也氏、V-Drive Technologiesの宮地寿昌、BIPROGYの松本裕志が登壇し、実証実験の成果と今後の展望について議論を交わした。
千葉市から始まる自動運転の社会実装と技術革新
松本現在のBIPROGYグループ経営方針(2024-2026)の中では、 注力していく領域の一つとしてモビリティ分野にスポットを当てモビリティ事業に携わる弊社顧客のデジタルトランスフォーメーション(DX)を推進しています。またVision2030に向けては、社会課題である労働力不足の解消、モビリティを通した新たな価値の提供、安心・安全な次世代モビリティの実現を通じて、社会全体のDX創出を目指しています。BIPROGYグループで推進している“モビリティ注力領域”に関する主要テーマは、以下の4つです。
① 安全な運転・運行の実現
② モビリティを通した新たな顧客体験や事業の創出
③ 物流分野における最適化と作業の自動化
④ メンテナンス・保全の高度化
安全なモビリティの実現に向けては、安全運転を支援するサービスを提供しています。例えば、ドライブレコーダーと、行動予測AIや画像解析技術を組み合わせ、事故の未然防止に貢献するソリューションを展開しています。これらの取り組みを次のステージへと進めるものとして、千葉市で実施された自動運転シミュレーションの実証実験があります。

国家戦略特区推進課 主査 樋口哲也氏
樋口千葉市は2016年、国家戦略特区の指定を受けました。幕張新都心を中心に、「近未来技術実証・多文化都市」というビジョンの下、先進的な取り組みを精力的に進めており、その一環として、ドローンや自動運転モビリティに関する実証実験も行っています。特に自動運転モビリティについては、無人・自動走行によるシェアリングサービスや、自動運転バスの走行実証などを実施しています。今回の自動運転シミュレーションは、こうしたこれまでの実績を土台として実現されたものです。

代表取締役社長 宮地寿昌
宮地本実証実験では、V-Drive Technologies が提供する仮想空間シミュレーションプラットフォーム「DIVP(Driving Intelligence Validation Platform)」を使用しています。
このプラットフォームは、内閣府の戦略的イノベーション創造プログラム(SIP)に
基づき、産学官が連携して開発した革新的なシステムです。
「DIVPコンソーシアム」は、SIPによって発足した自動運転車の安全性を仮想空間上で評価するための産学官連携プロジェクトです。
その一員である BIPROGY は、事業化を目的として V-Drive Technologies を 100%子会社として設立し、現在は DIVP の社会実装に向けた取り組みを進めています。
千葉市・幕張地区で行われた今回の実証実験には、シミュレーションモデルなどの技術提供を通じて参加しました。V-Drive Technologies は新東名高速道路での自動運転シミュレーションなど、他の実証実験にも参画しています。
デジタルツインで挑む自動運転の安全検証

執行役員 松本裕志
松本幕張地区で行われた実証実験では、DIVPのシミュレーション技術が活用されています。これは、いわばデジタルツインによる自動運転の検証です。では、なぜデジタルツインを導入したのでしょうか。
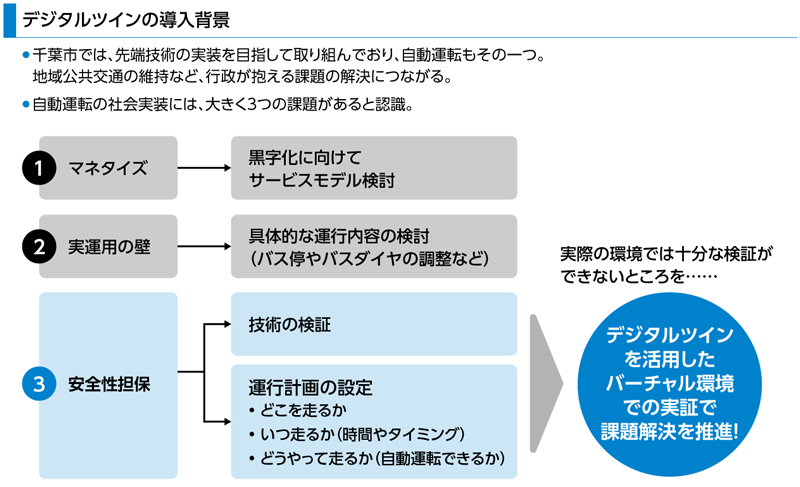
樋口社会実装においては、安全性の確保が最も重要です。そのためには、実際に車両を走らせて膨大なデータを収集する必要があります。しかし、実環境での自動運転車の走行にはさまざまな制約があります。例えば、走行には警察の許可が必要であり、安全マージンが十分に確保されていなければ、許可は下りません。実環境での走行も行っていますが、それだけでは必要なデータを十分に収集するのは困難です。
松本そのため、シミュレーションを活用してデータを収集しようというアプローチになったのですね。
樋口はい。自動運転の安全性確保には、網羅的な検証が欠かせません。例えば、交差点での右左折や雨天時の走行などは検証の機会が多く、大量のデータを比較的容易に収集できます。しかし、歩行者の飛び出しのようなリスクが高過ぎて現実の環境では検証できない事象や、発生頻度が非常に低いゲリラ豪雨などの気象条件などはデジタルツインの活用が適していると考えています。
松本デジタルツインによる検証では、どのような成果が得られたのでしょうか。
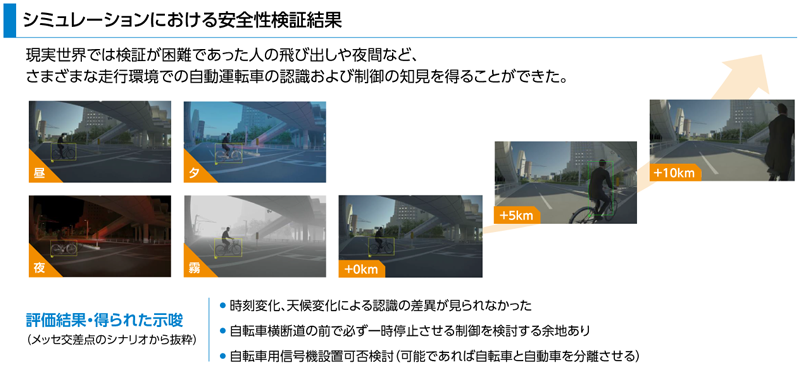
樋口まず、歩行者の飛び出しのように現実では試すことが難しいシナリオを安全に検証できた点が大きな成果です。また、昼夜や霧の有無といった時刻や気象条件、さらには自動運転車の速度を変えて、カメラやLiDAR(Light Detection and Ranging/光を使った検知と測距)など車載センサーの反応を確認しました。その結果、シナリオによっては時刻や気象条件が異なっても、車載センサーの反応に大きな差は見られないことが分かりました。
もう1つの成果は、シミュレーション結果が警察など関係機関への説明資料として活用できたことです。これにより、千葉県内で初めて夜間の自動走行実証を実現することができました。警察は、夜間に信号の色を正確に識別できるかどうかを懸念していましたが、シミュレーションによるセンサーの反応結果を提示することで、その懸念を払拭できたと考えています。
松本デジタルツインで検証した歩行者の飛び出しについて、もう少し詳しく教えてください。
宮地今回のシミュレーションでは、幕張地区の3.8㎞のルートをデジタルツイン環境で再現しました。バーチャルな自動運転車がこのルートを走行し、ドライバーの視点に応じて景色がリアルタイムに変化する高精細な映像を用いています。このルートには、路上駐車が多いエリアがあります。そこで、駐車車両の間から歩行者が飛び出してきた場合の挙動を検証しました。自動運転車の速度を時速15㎞、20㎞、25㎞に設定してシミュレーションを行ったところ、15㎞では歩行者を検知して停止できましたが、20㎞では歩行者の検知はできたものの、停止には至りませんでした。25㎞では検知が間に合わず衝突してしまいました。
現場から見えた課題と可能性

松本今回の実証実験において、どのような課題に直面されましたか。
樋口前例のない取り組みでしたので、まずは適切な事業者の選定に苦労しました。専門家による厳格な審査と助言を基に、慎重に実施体制を構築しました。千葉市が実施主体となり、各分野の専門企業と緊密に連携し、プロジェクトを推進しました。全体運営はBIPROGYが担い、デジタルツイン環境の構築、安全性評価シナリオの策定、シミュレーションの実施など、中核的な役割を果たしました。具体的には、三菱プレシジョンが3Dマップの構築、東京海上日動火災保険がリスクシナリオの作成、IHIが交通流の計測、先進モビリティが自動運転車両の提供を行いました。さらに、デロイト トーマツ コンサルティングが全体のアドバイザーとして、専門的な見地から支援しています。
松本その他に特筆すべき工夫はありましたか。
樋口自動運転車の将来的な導入エリアやルートはまだ確定していないため、ルート選定がきわめて重要でした。車両、歩行者、自転車の交通量が多い区間や、路上駐車の多いエリアなど、自動運転における技術的課題を検証できるルートを慎重に選定しました。
3Dマップの制作においても、独自の工夫を凝らしました。現実世界の再現では精度とコストのバランスがカギとなります。単なる高精細な画像ではなく、警察や地元住民に対して説得力のある映像制作を目指しました。建物やランドマークの再現度に重点を置き、検証に直接必要のない部分も含めて丁寧に映像化しました。さらに、著作権や商標権に配慮し、店舗の看板などのロゴをぼかすなど、雰囲気を損なわない創意工夫を行いました。
松本次のステップは社会実装ですね。実証実験結果をどのように活用されるお考えでしょうか。
樋口社会実装には、開発者や事業者の視点に加えて、行政としての多角的な検討が不可欠です。例えば、道路インフラの整備が挙げられます。路上駐車が多いエリアでは、自動運転の安全性を考慮した駐車規制の見直しが必要となるかもしれません。
さらに、道路にセンサーを設置し、自動運転車とリアルタイムで情報をやり取りできるようにするなど、次世代インフラの導入も今後の重要な検討課題です。今回の実証実験で得られた知見は、こうした将来の道路インフラのあり方を考える上で、きわめて貴重な示唆を与えるものと考えています。
持続可能な社会を支える自動運転と先端テクノロジーの挑戦
松本今後、自動運転の社会実装を進めていくには、シミュレーション環境のさらなる進化が不可欠だと考えています。
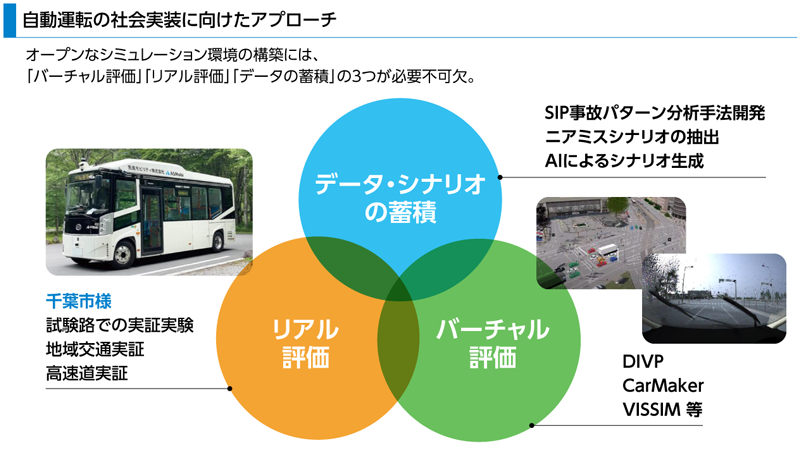
宮地おっしゃる通りです。自動運転の社会実装には、リアルな実証実験(リアル評価)と仮想空間での検証(バーチャル評価)、そしてそれらを支える膨大なデータとシナリオの蓄積がきわめて重要です。これらを有機的に組み合わせることで、オープンかつ革新的なシミュレーション環境の構築を目指しています。現在、試験路、地域交通、高速道路などでのリアル評価が進められる一方、DIVPをはじめとする仮想評価システムの進化も急務となっています。また、データやシナリオの面では、AIの戦略的活用が今後のカギを握ると認識しています。
松本自動運転の商用化において、日本は「遅れている」との指摘もありますが、いかがでしょうか。
宮地確かにそうした見方もありますが、日米のアプローチには本質的な違いがあります。アメリカは「問題が生じれば逐次改善する」という漸進的なアプローチを取る一方、日本は厳格な型式認証制度に基づき、新技術の導入に際して事業者にきわめて高度な安全性の証明を求めます。
いずれにしても、自動運転の社会実装において、安全性評価は最重要課題です。私たちはこの安全性評価を、競争ではなく「協調」の領域と捉えています。そして、このシミュレーション環境を日本国内にとどまらず、グローバルに展開していく構想を描いています。
松本千葉市での実証実験を通じて、自動運転の社会実装は着実に前進していると感じられますね。
宮地はい。今回の実証実験は、多くの貴重な知見を私たちにもたらしました。特に実車走行とデジタルツインシミュレーションの結果を比較することで、センサー技術や走行戦略の革新的な改善が可能になります。
幕張地区での経験は、千葉市だけにとどまらず、他の地域の街づくりやモビリティ戦略にも重要な示唆を提供できると考えています。
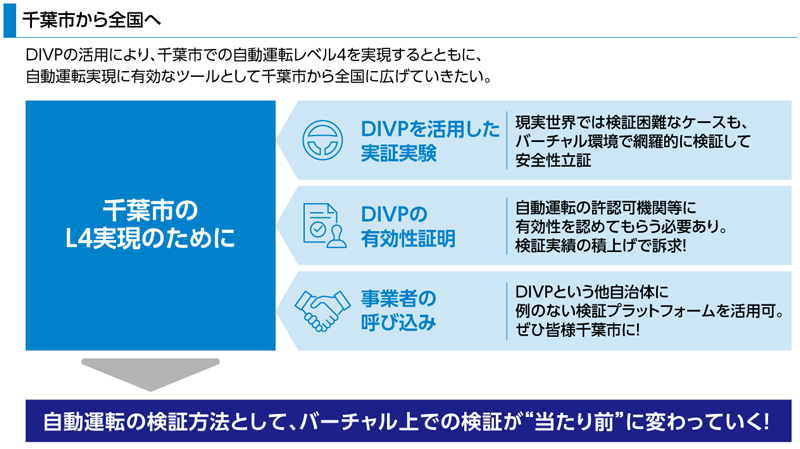
樋口私たちはDIVPを活用することで、千葉市における自動運転レベル4(運転者の関与なしに特定の条件下で完全に自動運転が可能なレベル)の実現を目指しています。同時に、DIVPを全国の自動運転検証における標準的なツールとして普及させていきたいと考えています。
将来的には、デジタルツイン上での検証が「当たり前」になる時代が来るでしょう。特に、危険な状況を含む多様なシナリオを安全に検証できるシミュレーションの優位性は、今後さらに高く評価されると確信しています。私たちは、DIVPを活用した検証プラットフォームの価値を積極的に発信し、関連事業者との戦略的な連携をさらに広げていきたいと考えています。
松本冒頭で触れた4つのテーマのうち、本日は「安全な運転・運行の実現」を中心に議論してきましたが、他の3つのテーマにおいても、さまざまな取り組みを進めています。
具体的な事例をいくつかご紹介します。新たな顧客体験・事業創出の領域では、本年5月よりサービス提供していますJR西日本様の決済・ウォレットサービス「Wesmo!(ウェスモ)」に対して、BIPROGYが決済プラットフォームを提供しました。物流分野における最適化・自動化においては、SaaS型WMS(倉庫管理システム)を提供するダイアログ社と資本提携し、両社の強みを生かして倉庫業務全体のDXを加速させています。メンテナンス・保全の高度化では、鉄道事業者向けに設備状態の可視化、技能継承、予知保全に貢献するAIを活用したメンテナンスプラットフォームの提供を既に開始しています。
労働人口が減少する日本において、地域の活力を維持・向上させることは喫緊の社会課題です。私たちは自動運転に限らず、さまざまな取り組みを通じて社会課題の解決に挑戦し続けたいと考えています。BIPROGYグループは、国や自治体、スタートアップ、各産業のプレーヤーと連携し、AIやロボティクスなどの最先端テクノロジーを駆使しながら、持続可能な社会の実現に向けて邁進してまいります。
- ※BIPROGYグループ各社社員以外による発言内容は各登壇者または所属組織の見解であり、BIPROGYグループ各社の見解を示すものではありません。



